技术原理
点云的概念:点云是在同一空间参考系下表达目标空间分布和目标表面特性的海量点集合,在获取物体表面每个采样点的空间坐标后,得到的是点的集合,称之为“点云”(Point Cloud)。
原理:当一束激光照射到物体表面时,所反射的激光会携带方位、距离等信息。若将激光束按照某种轨迹进行扫描,便会边扫描边记录到反射的激光点信息,由于扫描极为精细,则能够得到大量的激光点,因而就可形成激光点云。
分类
根据激光测量原理得到的点云,包括三维坐标(XYZ)和激光反射强度(Intensity)。
根据摄影测量原理得到的点云,包括三维坐标(XYZ)和颜色信息(RGB)。
结合激光测量和摄影测量原理得到点云,包括三维坐标(XYZ)、激光反射强度(Intensity)和颜色信息(RGB)。
点云数据是最为常见也是最基础的三维模型。点云模型往往由测量直接得到,每个点对应一个测量点,未经过其他处理手段,故包含了最大的信息量。这些信息隐藏在点云中需要以其他提取手段将其萃取出来,提取点云中信息的过程则为三维图像处理。
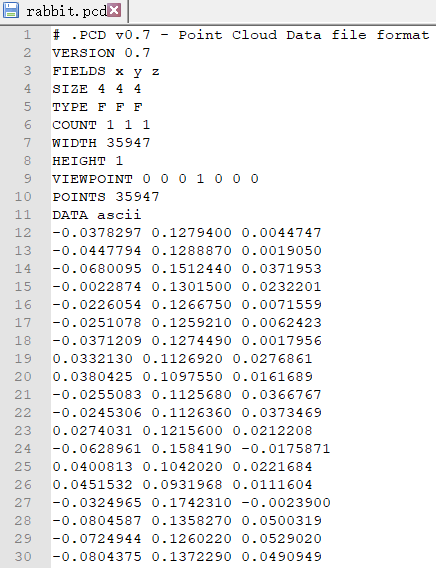
数据格式
LAS格式文件已成为LiDAR数据的工业标准格式,LAS文件按每条扫描线排列方式存放数据,包括激光点的三维坐标、多次回波信息、强度信息、扫描角度、分类信息、飞行航带信息、飞行姿态信息、项目信息、GPS信息、数据点颜色信息等。
clear all;
close all;
clc;
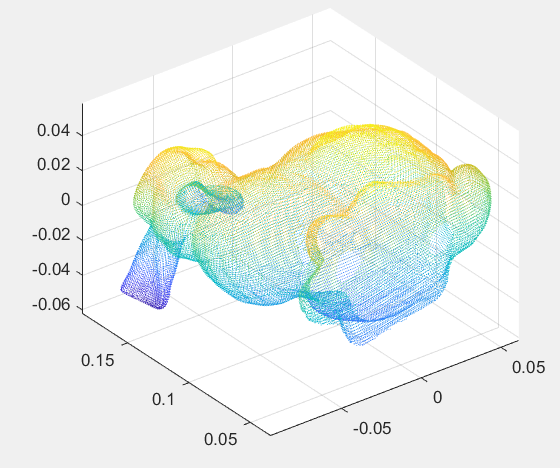
pc = pcread('rabbit.pcd');
pcshow(pc);
pc_point = pc.Location;
xlimit = pc.XLimits;
ylimit = pc.YLimits;
zlimit = pc.ZLimits;
cellsize = 0.005; %定义网格大小
%设置网格数量
W = floor((xlimit(2) - xlimit(1))/cellsize)+1;
H = floor((ylimit(2) - ylimit(1))/cellsize)+1;
D = floor((zlimit(2) - zlimit(1))/cellsize)+1;
%向网格里填数
voxel = cell(W,H,D);
for i =1:length(pc_point)
I = floor((pc_point(i,1)-xlimit(1))/cellsize)+1;
J = floor((pc_point(i,2)-ylimit(1))/cellsize)+1;
K = floor((pc_point(i,3)-zlimit(1))/cellsize)+1;
voxel{I,J,K} = [voxel{I,J,K};pc_point(i,:)];
end
%以网格中第一个点对原点云进行下采样
pointre =[];
for i=1:W
for j=1:H
for k=1:D
if isempty(voxel{i,j,k})==0
pointre=[pointre;voxel{i,j,k}(1,:)];
end
end
end
end
pcre = pointCloud(pointre);
figure;
pcshow(pcre);
特点
- 反映的基本上是目标表面情况
- 点云数据在形式上呈离散分布
- 点云数据具有可量测性(三维坐标、距离、方位角、表面法向量、表面积、体积)
- 点云数据具有一定的光谱特性(激光反射强度、颜色信息)
- 点云数据分布不均匀(扫描方式、扫描角)
设备
RGBD设备是获取点云的设备。
- Kinect
- XTionPRO(RMB899)

- ZED(RMB2462)




